Carrito esquiva Obstáculos con Arduino
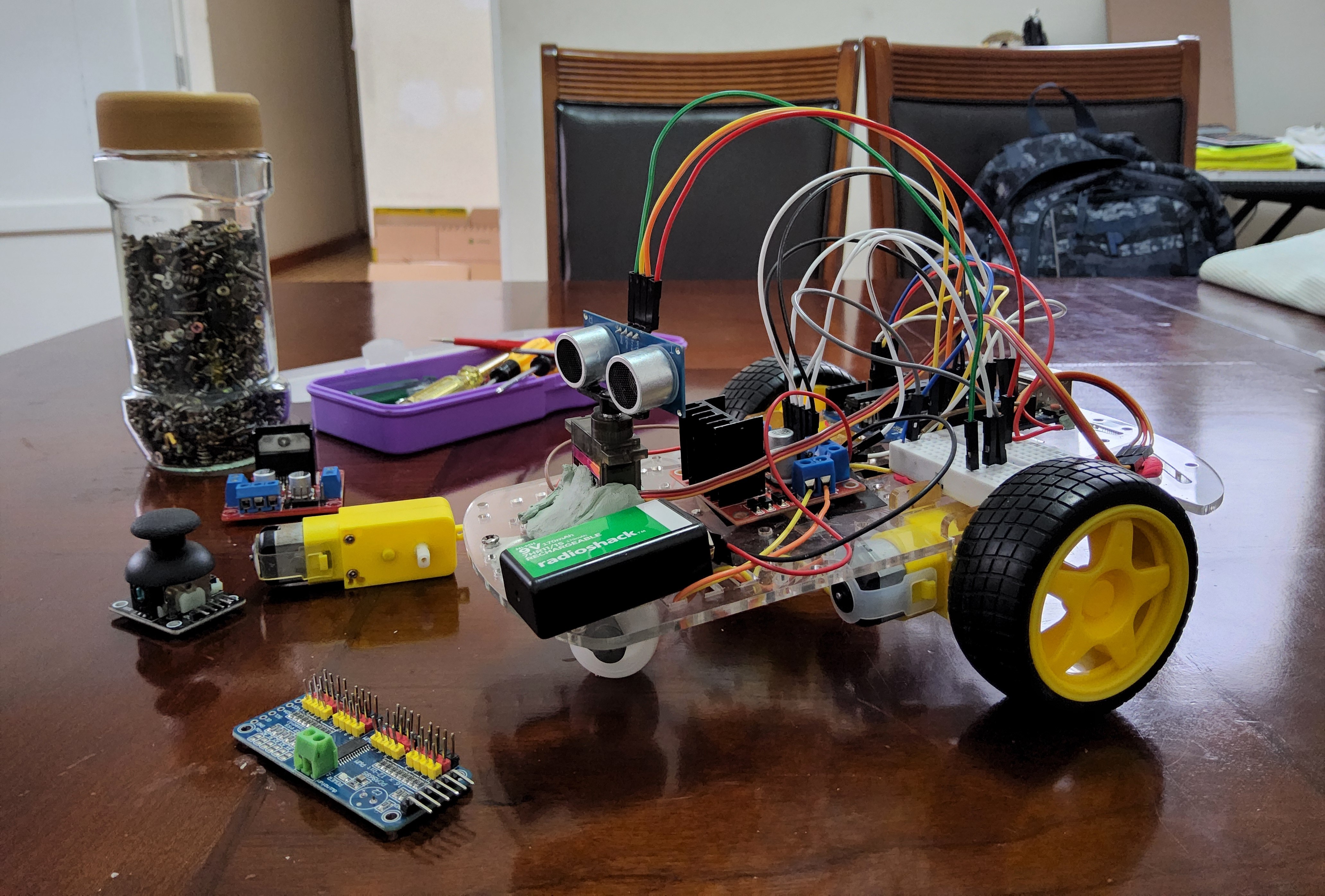
Nos complace presentarles a Sparky, un robot autónomo diseñado para enfrentarse a obstáculos y navegar con agilidad en cualquier entorno. Sparky es el resultado de la fusión entre creatividad, tecnología y un enfoque innovador en la robótica de asistencia social. Con un sistema de sensor integrado y un software programado para la detección y evasión de obstáculos, Sparky tiene la capacidad de adaptarse y moverse de manera inteligente en espacios concurridos.
Su diseño liviano y simple, combinado con una interfaz intuitiva, lo convierte en una herramienta ideal para realizar tareas en ambientes donde los objetos en movimiento y diversos obstáculos son factores muy frecuentes.
Su diseño liviano y simple, combinado con una interfaz intuitiva, lo convierte en una herramienta ideal para realizar tareas en ambientes donde los objetos en movimiento y diversos obstáculos son factores muy frecuentes.
Su diseño liviano y simple, combinado con una interfaz intuitiva, lo convierte en una herramienta ideal para realizar tareas en ambientes donde los objetos en movimiento y diversos obstáculos son factores muy frecuentes.